 The Controller Area Network, or CAN bus, is a communications protocol designed to let electronic control units (ECUs) within a vehicle share information efficiently. Systems like the engine, transmission, braking, infotainment, and more all rely on this shared two-wire network. CAN uses differential signaling and a message prioritization system to ensure reliable and timely data transfer, even in electrically noisy environments.
The Controller Area Network, or CAN bus, is a communications protocol designed to let electronic control units (ECUs) within a vehicle share information efficiently. Systems like the engine, transmission, braking, infotainment, and more all rely on this shared two-wire network. CAN uses differential signaling and a message prioritization system to ensure reliable and timely data transfer, even in electrically noisy environments.
The Early Days of CAN
In the early 1980s, engineers at Bosch were facing a challenge. As vehicles became more advanced, the amount of wiring required to connect all the electronic systems had grown significantly. In 1983, Bosch began developing a solution: a streamlined, efficient network that would reduce wiring and increase reliability. The result was CAN, introduced publicly in 1986 at the SAE Congress in Detroit.
Intel and Philips released the first CAN controller chips soon after, enabling real-world implementation. Mercedes-Benz was the first automaker to use CAN in a production vehicle with the W140 S-Class in 1991. That same year, Bosch published the CAN 2.0 protocol, and by 1993, ISO had ratified it as ISO 11898, cementing its global importance.
Broader Adoption and Evolution
By the mid-1990s, CAN was incorporated into OBD-II diagnostics systems, which became mandatory in the U.S. in 1996. The protocol spread across Europe shortly after. To meet growing demands for data speed and capacity, Bosch released CAN FD (Flexible Data-rate) in 2012, with ISO formalizing it in 2015.
Today, CAN bus is not only central to engine management and emissions compliance but also plays a key role in modern vehicle technology.
Beyond Audio: CAN’s Role in Modern Vehicle Systems

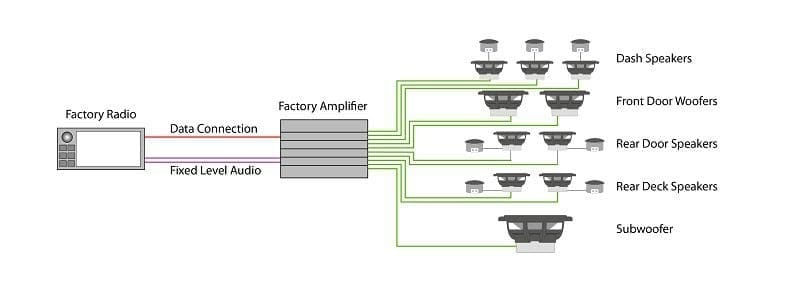
While CAN bus has made significant improvements in car audio integration, enabling better connectivity for head units, DSPs, and amplifiers, it’s equally important in other areas of automotive electronics.
Remote starters rely on CAN signals to read vehicle status like ignition position and door lock state, ensuring seamless operation. Vehicle security systems use CAN to monitor and control access, making them more sophisticated and harder to bypass. Advanced Driver Assistance Systems (ADAS), such as lane-keeping, adaptive cruise control, and collision avoidance, use CAN to share data between cameras, radar sensors, and control modules in real time.
For installers and integrators, understanding CAN is critical for safely interfacing with these systems. Misinterpreting CAN data or introducing interference could affect not just an audio upgrade but vital safety and convenience functions as well.
Working with CAN Bus
Successful CAN-based installations require a good understanding of network types (high-speed vs. low-speed), proper use of twisted-pair wiring, and the presence of termination resistors. Tools that interface via the OBD-II port offer a simplified way to access the CAN network for diagnostics, firmware updates, or customizations.
With CAN becoming more prevalent, especially in EVs and high-end vehicles, installers will need to stay up to speed with evolving standards to maintain compatibility and performance.
Final Thoughts
Since its creation in the 1980s, CAN bus has become the backbone of vehicle communication. From simplifying audio integration to enabling remote starts, enhancing vehicle security, and powering ADAS technologies, CAN is essential to modern automotive design. Understanding how to work with this system isn’t just a bonus—it’s a requirement for today’s vehicle electronics professionals.
If you’re planning an audio upgrade or integrating remote start and security systems into your vehicle, understanding CAN bus technology is essential. Drop by your local specialty mobile enhancement retailer to see how they can design and install a solution that works seamlessly with your vehicle’s networked systems.
